Теоретические соображения
3.1.3. Теоретические соображения
3.1.3.1. Система катушек с перпендикулярными осями
3.1.3.2. Отражение сигнала за счет проводимости объекта
3.1.3.3.Отражение сигнала за счет ферромагнитных свойств объекта
3.1.3.4.Суперпозиция проводящих и ферромагнитных свойств объекта
3.1.3.5.Учет формы объекта
3.1.3.6.Система катушек со скрещенными осями
3.2.2. Теоретические соображения
Рассмотрим подробнее датчик металлоискателя на биениях, состоящий из одной катушки (см. рис.15).
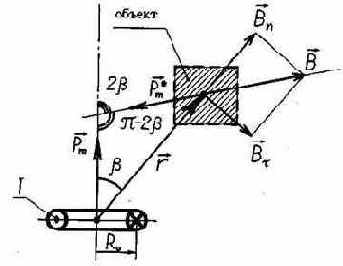
Рис. 15. Взаимодействие однокатушечного датчика металлоискателя с объектом.
Индукция магнитного поля в центре катушки составляет:

где Pm - магнитный момент, создаваемый током катушки I, R0- радиус катушки, S - площадь катушки.
За счет взаимодействия с проводящим и/или ферромагнитным объектом возникает добавочная компонента индукции. Так как механизм ее появления точно такой же, как и в рассмотренном ранее случае металлоискателя по принципу "передача - прием", можно воспользоваться результатами предыдущего раздела и записать для добавочной компоненты индукции:

где K1 - коэффициент, вычисляемый по формуле (1.8), (1.9) или (1.23).
Так как коэффициент K1 - функция комплексная, то и относительное изменение индукции можно обозначить как функцию оператора Лапласа:

Таким образом, полное сопротивление катушки датчика металлоискателя (без учета омического сопротивления провода и межвитковой емкости) можно представить как:

где L - индуктивность катушки без влияния объекта.
Под воздействием объекта меняется полное сопротивление катушки. В металлоискателях на биениях это изменение оценивается по изменению резонансной частоты колебательного LC- контура, образованного катушкой датчика и конденсатором.
3.3.2. Теоретические соображения
Как уже отмечалось, металлоискатель индукционного типа можно представить как некоторый предельный случай металлоискателя по принципу "передача-прием", когда излучающая и приемная катушка совпадают. Поэтому многими результатами раздела 1.1 можно воспользоваться и для металлоискателя индукционного типа. Кроме того, от металлоискателя на биениях индукционный металлоискатель отличается только способом регистрации отраженного сигнала, поэтому и некоторые результаты раздела 1.2 также будут справедливы для прибора индукционного типа.
Взаимодействие катушки металлоискателя индукционного типа с металлическим объектом может проиллюстрировать рис.15. Отраженный сигнал можно оценить величиной индукции магнитного поля (1.36). В отличие от приборов по принципу "передача-прием", величина отраженного сигнала при допущении (1.3) зависит только от расстояния между объектом и датчиком, и не зависит от ориентации датчика на объект.
Дополнительное напряжение, наведенное в катушке датчика отраженным сигналом, вычисляется по формуле (1.17), где индукция отраженного сигнала равна (1.36). Без учета знака это напряжение составляет:

где p - оператор Лапласа, I - ток в катушке, r - расстояние между датчиком и объектом, S - площадь катушки, N - число ее витков, R - эквивалентный радиус объекта, KS- коэффициент, вычисляемый по формуле (1.23).
